About ARML
- 홈으로
- About ARML
- Mission
From Imagination to Reality:
Create Robots that Transform
At ARML, our research aligns with the creative process inherent in invention.
We strive to build a place where imagination knows no bounds,
and where anything can be created and explored.
If you’re the one with a curiosity for envisioning and creating new things,
you are invited to join us in this exciting journey of discovery and innovation.
Fields of Interest

Innovative rover designs are pursued for lunar and Martian exploration, in-situ resource utilization, and space construction. System shape fundamentally defines capability; through minimized complexity, weight, and volume, novel mechanisms are introduced to extend performance beyond conventional limits.

Research addresses spacecraft capture and robotic manipulation through deployable and reconfigurable mechanisms. These design strategies enhance mission safety, efficiency, and effectiveness in high-risk space environments.
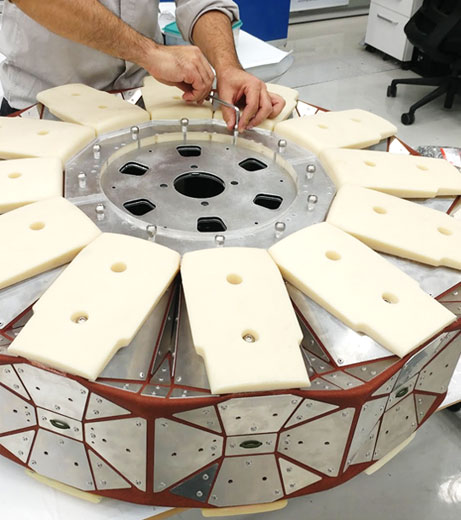
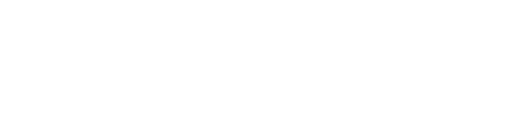
Large deployable structures such as antennas, optical systems, and solar panels are investigated, where system size directly determines performance. Stable and efficient design methodologies are applied to achieve high geometric precision and reliable functionality.
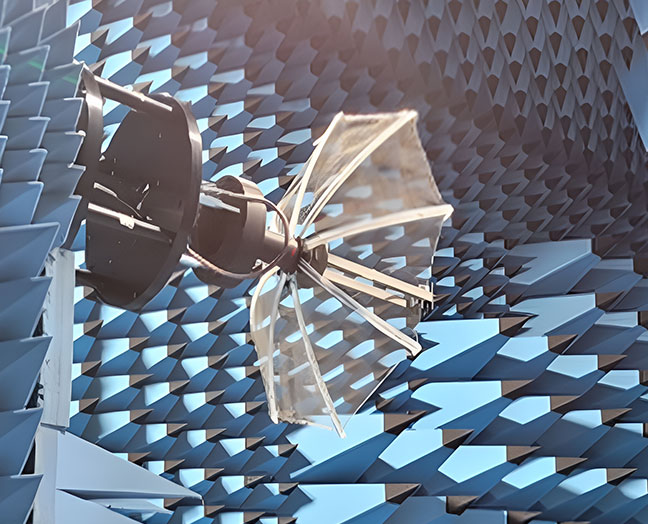
Deployable and adaptive mechanisms are introduced to overcome the limits of conventional aerial systems. Representative concepts include solar-powered drones with reconfigurable panels and fixed-wing drones with foldable wings.

Deployable and reconfigurable design concepts are extended to marine applications, offering new solutions for underwater operations. Current studies include recovery mechanisms that enable reliable docking of autonomous underwater vehicles.