- 홈으로
- RESEARCH
- Research Project

[SEM] Underwater Docking Mechanism for AUV
Field
Marine RoboticsType
Journal PublicationStatus
(Finished)Year
2025Participants
Gagyeong Park*(LEAD), Ki-Hoon Lee*(LEAD), Sung-Jin Lee, Seongjun LeeJournal
Structural Engineering and Mechanics
Details
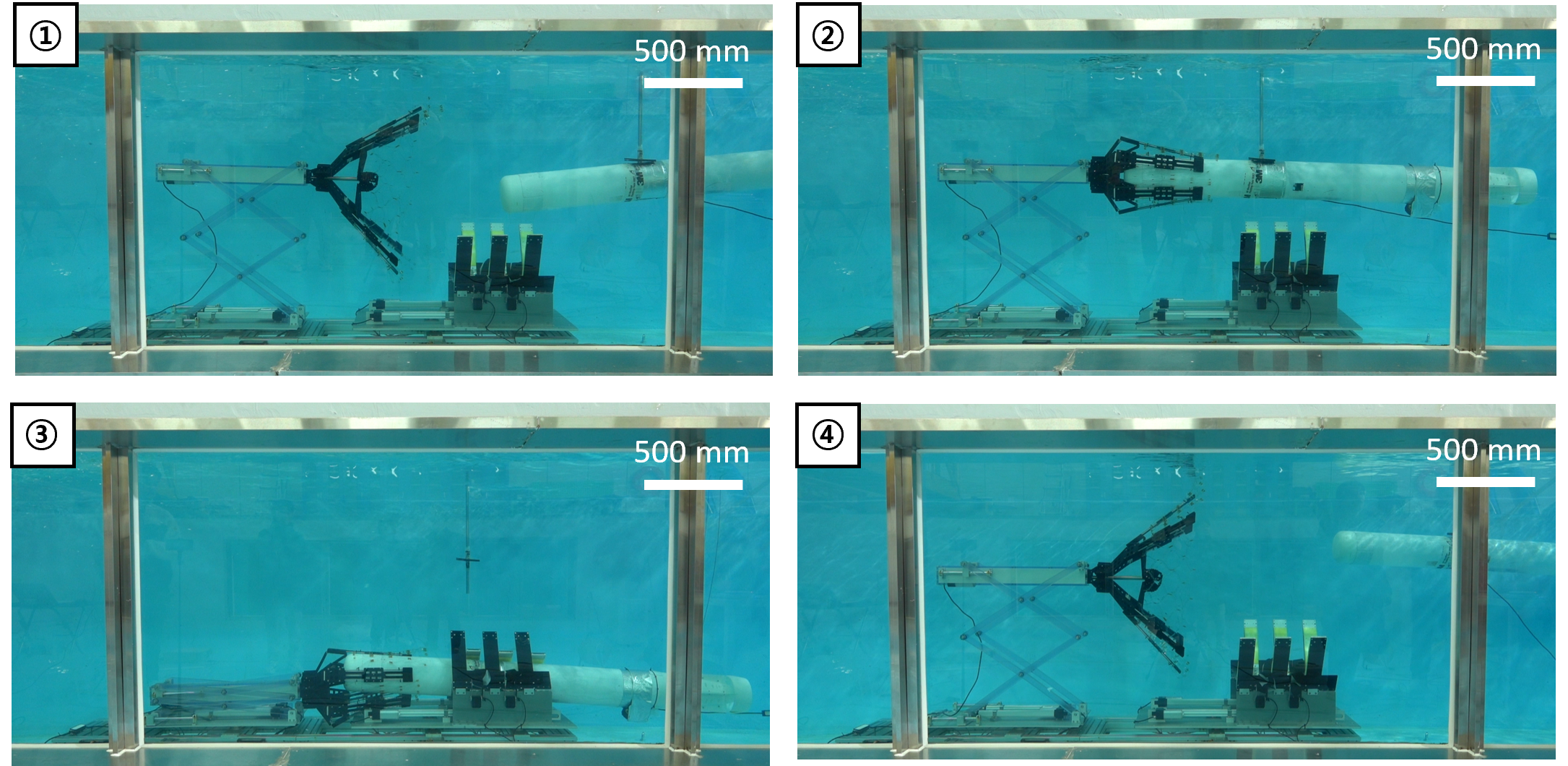
This study introduces a new underwater docking system for autonomous underwater vehicles (AUVs). Since this system can be mounted on a submarine, it enables efficient docking and can solve the battery-shortage problem of AUVs. Using an origami-inspired structure, the system is designed to be reliable even in flowing water.
Youtube Link
Journal Link Click link url
Collaborators KAIST Applied Fluid Mechanics Lab (Prof. Daegyoum Kim)
Funding Agency for Defense Development
More Information
Related Research Projects :
Related Journal Papers :
Related Patents : D. Lee, G. Park, K. Lee, S.-J. Lee, and S. Lee, “무인잠수정의 수중 회수를 위한 선체 설치형 전개형 도킹 장치,” Korean Patent Application 10-2025-0079669, Jun. 17, 2025.